The international academic journal “Nature” published a paper online announcing new radar images of China’s “Zhurong” Mars rover. This is the world’s first rover radar detection on the Mars Utopia Plain, and the first new detection data in this area in 45 years. , providing insights into the basin surface structure of the Utopian Plain.
In 1976, the U.S. Pirate 2 probe landed in the northern part of the Utopia Plain and carried out the first landing detection, but failed to detect the underground structure.
Although the Mars high-altitude orbital radar can detect the superficial structure of Mars on a global scale, its resolution is low, especially for the superficial surface less than 100 meters.
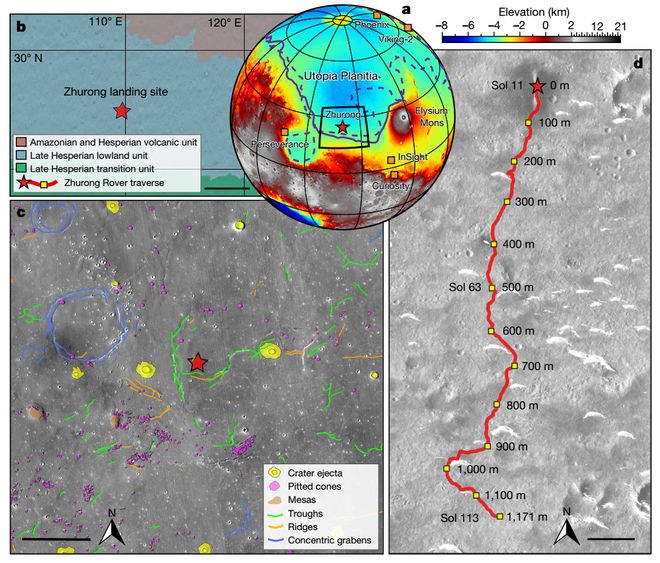
In 2021, the “Zhurong” rover carried by “Tianwen-1” in China’s first Mars mission successfully landed, and then traveled through the Mars Utopia Plain. The “Zhurong” Mars rover’s subsurface detection radar can effectively image the shallow underground structures in the inspection area, deepening our understanding of key scientific issues such as the evolution of the Utopian plain and the distribution of groundwater/ice.
The Institute of Geology and Geophysics of the Chinese Academy of Sciences announced that the study was based on the low-frequency radar data of the Zhurong Mars rover, and through fine analysis and imaging, the superficial (<80 meters) structure and physical properties of the landing area were obtained for the first time, providing information about the long-term potential of Mars. There is observational evidence of water activity, which provides an important basis for in-depth understanding of the geological evolution, environment and climate change of Mars.
Chen Ling, a researcher at the Institute of Geology and Geophysics of the Chinese Academy of Sciences, is the corresponding author of the paper. Based on ground-penetrating radar data collected by Zhurong as it traveled about 1,117 meters from its landing site, she and her colleagues showed surface images of the southern Utopia Plain, revealing multiple subsurface structures, suggesting deposits following an occasional flood millions of years ago things that could improve our understanding of planetary geology and hydrological history.
The Utopia Plain is the largest impact basin on Mars, and it may have been a huge ancient ocean, indicating that there may have been a habitable environment on Mars in the early days. The Utopian Plain is extensively covered by the Vastitas Borealis Formation (VBF), which may represent either flood-related outflow channel alluvial sediments or residual sedimentary material after paleo-ocean evaporation. In addition, the utopian plain has many typical landforms (Fig. 1c), such as giant polygons, concave cones, and wall craters, which all indicate that Mars had a large amount of water/ice in the past. However, it is currently unknown whether water/ice still exists in the subsurface of this region, which limits our understanding of the evolution of Martian water bodies.
So far, humans have carried out four patrol radar detections on extraterrestrial celestial bodies. Among them, Chang’e-3 and Chang’e-4 have achieved fine detection of the superficial structures on the front and back of the moon for the first time. The US Perseverance Zhurong rover will open a new era of Mars radar patrol detection in 2021. Perseverance’s detection area is the edge of the Jezero impact crater, limited by the main frequency of the radar (150-1200 MHz), and its actual maximum detection depth is only 15 meters. Compared with the Perseverance radar, the Zhurong high-frequency radar has a higher frequency (450-2150 MHz), and the low-frequency radar has a lower frequency (15-95 MHz), which makes the high-frequency radar to shallow depths of about 0-5 meters. The surface target can be seen more “detailedly”, and the low-frequency radar can see the underground target more “deeply”, and the actual maximum detection depth is 80 meters.
The planetary and lunar internal structure research team of the Institute of Geology and Geophysics of the Chinese Academy of Sciences, together with researchers from the National Space Science Center and Peking University, conducted an in-depth study of the low-frequency radar data with a length of about 1171 meters collected by the Zhurong rover during the first 113 Martian days. After analysis, high-precision structural layered images and stratigraphic physical property information above 80 meters were obtained.
Low-frequency radar data imaging results and interpretation. (a) Low-frequency radar profile; (b) lithologic stratigraphy; (c) average dielectric constant as a function of depth. The solid white line is the stratigraphic boundary, and the dashed line is the approximate boundary of the variation of reflection patterns between layers
Based on the reflection mode characteristics and the estimated dielectric constant, the subsurface structure can be divided into four layers. The thickness of the first layer is less than 10 meters, and the average dielectric constant is between 3-4. The depth of the second layer is about 10-30 meters, and the reflected energy in this layer gradually increases with depth, but there is no clear and continuous reflection interface, and the average dielectric constant is 4-6. Numerical simulations show that these reflective features represent that the layer contains more rocks, whose grain sizes gradually increase with depth. The depth of the third layer is about 30-80 meters. Similar to the second layer, this layer also has the characteristics of a mode change of reflection that increases weakly with depth, but the reflection is relatively stronger and the average dielectric constant is higher (6-7) , which indicates that the stones in the third layer are larger in size (up to the meter scale) and more chaotically distributed. In addition, no clear bottom interface of the third layer was observed. This is either because there is no obvious change in dielectric properties at the bottom of the layer, or the reflected energy of the radar is very weak at a depth of about 80 meters, reaching the detection limit. .
Combining radar images with the geology, topography, and impact crater excavation depth and age constraints of the landing area, the following insights are obtained:
(1) The uppermost layer with a depth of less than 10 meters is the fire soil layer.
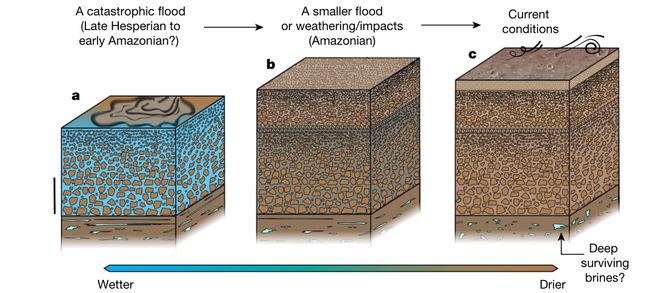
(2) The second-layer depositional sequence with a depth of 10-30 meters may be the result of the middle-late Amazonian fire surface reformation event in the landing area. Short-term flooding, long-term weathering, or repeated meteorite impacts may have formed the upwardly thinning sedimentary sequence in this layer.
(3) The third-layer depositional sequence with a depth range of 30-80 meters may reflect an older and larger-scale fire surface modification event in the landing area. Based on the impact crater dating results, it is estimated that this transformation event may have occurred in the Late Western to Early Amazonian 3.5-3.2 billion years ago, and may be related to the large-scale flooding activities in the southern Utopian Plain.
Besides layering features, another important structural feature of radar profiles is the smooth transition between layers. This suggests that the original basalt layers from the Elysian eruption or some late volcanism may be missing or too thin to survive subsequent fire surface reformation events within the depths of 80 meters below the Zhurong landing zone .
One of the main objectives of the Zhurong rover’s subsurface radar is to detect the presence of groundwater/ice in the southern part of the Utopia Plain. If there is a water-rich layer, the radar signal will be strongly attenuated, reducing the detection depth. The low-frequency radar imaging results show that the signal strength is stable in the depth range of 0-80 meters, and there is no water-rich layer. In addition, the dielectric constant of the inversion constraint in this study is low (not more than 9), unlike the high dielectric constant (greater than 15) that water-bearing substances typically have, thus ruling out the possibility of a water-rich layer beneath the patrol path. The thermal simulation results also further show that it is difficult for liquid water, sulfate or carbonate brine to exist stably above the 100-meter surface of the Zhurong landing area. However, since the dielectric constant (2.5-8) of sulfate or carbonate salt ice is comparable to that of lithological materials, the possibility of salt ice in shallow layers cannot be ruled out at present.
Associated images show the Utopia Basin’s multi-layered structure about 70 meters thick, covered by less than 10 meters of regolith. Surface regolith consists of loose rock and dust.
The layered structure may suggest that the basin experienced occasional flooding between the Late Hesperian and the Amazonian, the researchers noted.
The researchers emphasized that although the radar data of Zhurong alone cannot provide direct evidence of the existence of liquid water in the bottom 80 meters of the Utopia Basin, the existence of salty ice cannot be ruled out.
Earlier, on the evening of September 19, 2022, a paper published online in the international academic journal “Nature-Earth Science” stated that NASA’s “InSight” lander detected a meteor on Mars. Seismic waves from body impact events were traced back to associated, newly formed impact craters by NASA’s Mars Reconnaissance Orbiter. The study is the first to detect seismic and sound waves from an impact on another planet, and to find the associated source crater.
On May 15, 2021, the “Tianwen No. 1” probe successfully landed in the pre-selected landing area in the southern part of the Utopia Plain on Mars. The first Mars exploration mission landed on Mars successfully. The rover established ground-to-ground communications.
On May 17, 2021, the orbiter implemented the fourth near-fire braking, entered the relay communication orbit, established a stable relay communication link for the rover, and successively returned image data.
On May 22, 2021, the “Zhurong” Mars rover has safely left the landing platform, reached the surface of Mars, and began to patrol and explore.
On June 7, 2021, the National Space Administration released a high-resolution image of the landing area of the Tianwen-1 mission. In the image, the Zhongtianwen-1 landing platform, the “Zhurong” rover and the surrounding areas are clearly visible.
On June 11, 2021, the National Space Administration released images of the landing site panorama, Martian topography, “China Imprint” and “Patrol Group Photo” taken by the “Zhurong” rover.

GIPHY App Key not set. Please check settings