The research was published in a paper in the journal Nature.
Sky-defying height, breaking biological limits
In fact, jumping robots have long been common. Coming down to those incredible jumping animals in nature, matching their abilities to robots sounds plausible.
But this time, the researchers focused on getting the robot to jump as high as possible.
They creatively call it “our jumper,” showing the robot’s array of maneuvers. For example, self-launch, landing…

Correct itself and fire again…

In fact, the weight of this robot man is not light among the same type of robots.
It’s 30cm tall, weighs 30g, and consists almost entirely of carbon fiber bows that act as springs and rubber bands that store energy in tension.
The central part of the robot includes a motor, some batteries, and a latching mechanism attached to a rope that connects the top and bottom of the robot.
When the robot begins to prepare to jump, it starts to spin its motors.
Ready to go. . .
Then over a 2-minute period, twist the rope and squish yourself.
The energy is gradually stored, and when the rope is completely wound, another pull on the motor triggers the latching mechanism, which releases the rope, releasing all the energy in about 9 milliseconds.
Overall, the robot has a specific energy of over 1,000 joules per kilogram, which is an order of magnitude better than even the best bionic jumping robots, and easily surpasses any other jumping robot by a factor of five.
How can you jump so high?

So the question is, how can a robot that can jump “thousands and thousands” jump so high?
The answer lies in it – the rotary motor. The research team said: I am very smart.
This rotary motor, which is incompatible with biology, supplements and replaces the “tendon” function of natural animals.
With a rotating motor and a gear on the spring, it is possible to use relatively low power over a relatively long period of time, storing a large amount of energy as the motor rotates.
Getting the robot to jump higher might involve using a more flexible spring to maximize the amount of energy the robot can store without increasing its mass. “We’ve pushed energy storage very far with our hybrid tension-compression spring,” Hawkes said. “But I believe there may be some spring design that can push it further. We’re at around 2,000 joules per kilogram right now.”
“We’ve made an unbelievable specialized device and it works well
One day to the moon
This combination of mobility and efficiency may have led researchers to set their sights on space, making it ideal for exploring space, where jumps can take people farther.
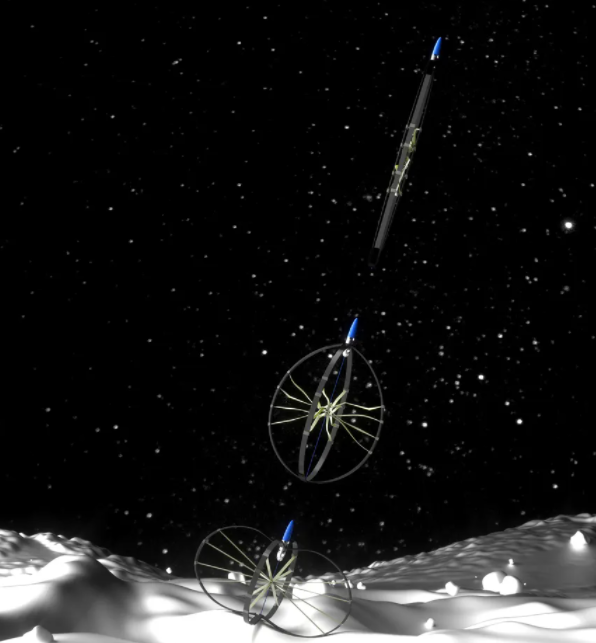
On the Moon robot, the robot is able to cover half a kilometer per jump due to low gravity and no atmospheric drag.
“The application we’re most interested in right now is space exploration,” Hawkes said. “The Moon is a really ideal jumping-off site, which opens up new possibilities for exploration as it overcomes challenging terrain.
The robot can jump to the edge of an inaccessible cliff or to the bottom of a crater, collect a sample, and return to the wheeled rover. ” said Hawkes, who and his team are currently working with NASA to develop the system, with the goal of launching it to the moon within the next five years.